Map projection is a systematic representation of a spherical body, such as the Earth, in a flat (planar) surface. Each map projection has specific properties that make it suitable for specific mapping needs. Parameters defined by map projection constitute a function used to convert points from latitude and longitude to Cartesian coordinates.
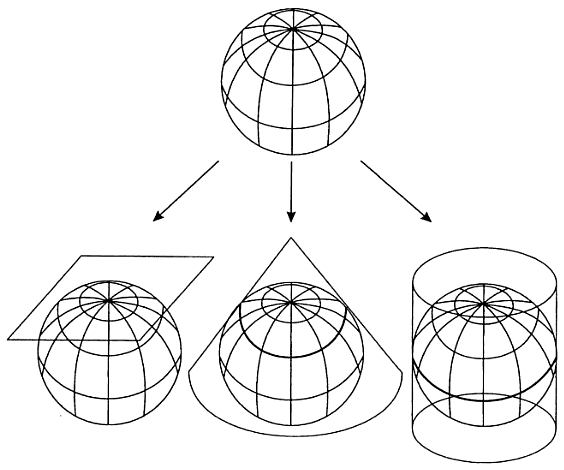
The three principal types of developable (flattenable) surfaces: planar on the left, conic in the middle, and cylindrical on the right. These are all shown in the tangentable case (touching the globe at a point or along the line). The secant case results when the conformable surfaces cuts the globe, instead of touching it.
Following map projections are supported:
Projection Origin
The origin of rectangular coordinates for a map projection. For example, the longitude origin of a conic projection is the line of longitude that is straight and perfectly vertical. This longitude value can be converted to an X-coordinate of zero, and is usually specified as the center of the map. The latitude of the projection origin is often the nearest round number that is south of the southernmost extent of the region to map.
False Origin
When the central meridian bisects the mapping region, half of the X coordinates are negative values. An offset called the false origin can be added to all coordinates to make them positive. The X coordinate of this offset is called the false origin easting. The Y coordinate of this offset is called the false origin northing.
Scale Reduction Factor
To produce the smallest possible distance between the projection surface and any point in the region you are mapping, you must specify a scale reduction factor. This is particularly important when you are mapping large regions.
Quadrant
One of the four regions defined by the axes of a Cartesian coordinate system. Quadrants are numbered counterclockwise, one through four. Numbering begins with the quadrant in which both the x- and y-coordinates are positive (usually the upper-right quadrant).
Useful Range Parameters
The minimum and maximum latitude and longitude for which a coordinate system is considered valid.